Produkte
AGV - automatisiertes geführtes Fahrzeug
Hochleistungs-Vollschutz-AGV für lauernde Fahrer



Der Latent mobiler Roboter Die Serie transportiert Lagerregale oder Paletten durch ihren Hubmechanismus zum Kommissionierplatz. Es verfügt über eine optimierte Bewegungsleistung und einen verbesserten Sicherheitsschutz und bietet hochproduktive und kostengünstige Ware-zur-Person-Lösungen.
Für den Umschlag im Lager oder die Verbindung zwischen der Produktionslinie und dem Lager wird das flexible Handhabungs-FTF ausgewählt, um den herkömmlichen Gabelstapler und andere Handhabungsgeräte je nach Bedarf zu ersetzen. Kingmore bildet eine intelligente Informationsinteraktion zwischen dem Handhabungssystem, dem Lager und der Produktionslinie, die die Rückverfolgbarkeit von Informationen in der gesamten Verbindung gewährleisten, eine intelligente, flexible Produktion schaffen und den Bedarf an manueller Nutzung reduzieren kann.
1. Aufzugstyp
Heberoboter sind automatisierte Logistikgeräte, die autonomes Laden, Heben und Transportieren ermöglichen. Es zeichnet sich dadurch aus, dass es mit einer Hebevorrichtung ausgestattet ist, die Güter vom Boden in eine höhere Position heben kann, um Aufgaben wie Handhabung und Lagerung zu erledigen. Es wird normalerweise in Industrie- und Lagerlogistikanwendungen eingesetzt und kann die Produktionseffizienz effektiv verbessern und die Logistikkosten senken.
Q2-400D | Hubhöhe (mm) | 60 |
| Spezifizierte Last (kg) | 400 | |
| Navigation | QR-Code/LSLAM | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 820 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 780*545*300 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 2,0 | |
| Gewicht (kg) | 93 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
Q3-600D | Hubhöhe (mm) | 60 |
| Spezifizierte Last (kg) | 600 | |
| Navigation | QR-Code/LSLAM | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 995 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 950*650*250 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 2,0 | |
| Gewicht (kg) | 132 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
Q7-1000E | Hubhöhe (mm) | 60 |
| Spezifizierte Last (kg) | 1000 | |
| Navigation | QR-Code/LSLAM | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 1200 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 1150*820*254 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 2,0 | |
| Gewicht (kg) | 172 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
Q8-2000A | Hubhöhe (mm) | 100 |
| Spezifizierte Last (kg) | 2000 | |
| Navigation | QR-Code/LSLAM | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 1780 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 1523*1150*327 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 0,9 | |
| Gewicht (kg) | 550 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
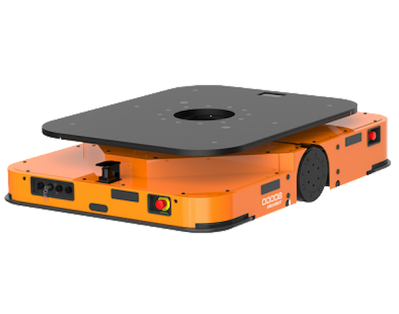
2. Fahrgestelltyp
Das latente Roboterfahrgestellfahrzeug ist eine Roboterplattform mit Erweiterungsfunktionen der oberen Schicht und Fahrgestellmobilitätsfähigkeiten. Seine Besonderheit besteht darin, dass der Tisch über eigene obere Befestigungslöcher verfügt und eine integrierte Schnittstellenplatine für den oberen Mechanismus vorgesehen ist, um Hardware-Schnittstellen zu erhalten; Es kann sich an eine Vielzahl von oberen Erweiterungsanforderungen anpassen, wie z. B. Rollen, kleine Roboterarme, Inspektionskameras, Umgebungserkennungsgeräte usw., und verfügt über umfangreiche Funktionen. Sekundäre Entwicklungs- und Erweiterungsfähigkeiten können in verschiedenen Industrie-, Lager- und Logistikbereichen in großem Umfang eingesetzt werden. Intelligente Fertigung und andere Szenarien.
Q3B-600C-D | Hubhöhe (mm) | / |
| Spezifizierte Last (kg) | 600 | |
| Navigation | QR-Code | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 995 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 950*650*300 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 2,0 | |
| Gewicht (kg) | 126 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
Q3B-600L-D | Hubhöhe (mm) | / |
| Spezifizierte Last (kg) | 600 | |
| Navigation | LSLAM | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 995 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 950*650*300 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 2,0 | |
| Gewicht (kg) | 126 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
Q7B-1000C-E | Hubhöhe (mm) | / |
| Spezifizierte Last (kg) | 1000 | |
| Navigation | QR-Code | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 1200 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 1150*820*300 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 2,0 | |
| Gewicht (kg) | 184 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
Q7B-1000L-E | Hubhöhe (mm) | / |
| Spezifizierte Last (kg) | 1000 | |
| Navigation | LSLAM | |
| Steigfähigkeit (°) | 3 | |
| Rotationsdurchmesser (mm) | 1200 | |
| Nennbetriebszeit (h) | 8 | |
| AbmessungenL*B*H(mm) | 1150*820*300 | |
| Nennbetriebsgeschwindigkeit (ohne Last) (m/s) | 2,0 | |
| Gewicht (kg) | 184 | |
| Positionierungsgenauigkeit (mm,°) | ±10/±1 | |
| Ladezeit (h) | ≤1,5 | |
| Fahrmodus | Differentialantrieb |
EIGENSCHAFTEN VON Gabelstapler AGV
Anwendungen




Add: NO.409 West Jianshe Road, Economic Development Zone, Jinhu County, Jiangsu Province, China
Bitte lesen Sie weiter, bleiben Sie auf dem Laufenden, abonnieren Sie uns und wir heißen Sie herzlich willkommen, uns Ihre Meinung mitzuteilen.



Urheberrechte ©
2026@ Jiangsu Kingmore Storage Equipment Manufacturing Co., Ltd Alle Rechte vorbehalten.
Seitenverzeichnis
| Blog
| Xml
| Datenschutzrichtlinie
 NETZWERK UNTERSTÜTZT
NETZWERK UNTERSTÜTZT
 Deutsch
Deutsch English
English español
español 日本語
日本語 한국의
한국의 français
français العربية
العربية português
português 中文
中文 русский
русский